ステッピングモーターを使ってみる
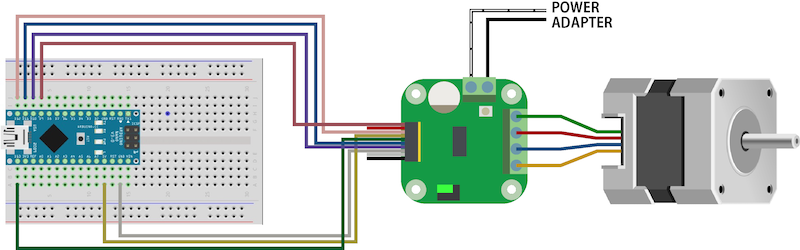
ステッピングモータは回転方向と角度をコントロールできるモーター
モータードライバーで制御することでよりトルクが出せます
このコードをは共有フォルダにあるL6470SPIStepperライブラリを追加しないと動きません
正常に動くと90°ずつ首振りするコードです
サンプルコード
#include <SPI.h>
#include "L6470SPIStepper.h"
#define PIN_SPI_MOSI 11
#define PIN_SPI_MISO 12
#define PIN_SPI_SCK 13
#define PIN_SPI_SS 10
#define PIN_BUSY 9
L6470SPIStepper stepper(PIN_SPI_MOSI, PIN_SPI_MISO, PIN_SPI_SCK, PIN_SPI_SS, PIN_BUSY);
void setup()
{
Serial.begin(9600);
Serial.setTimeout(5000);
delay(500);
stepper.setup(L6470_MODE_TEST);
stepper.setPower(0x1F, 0xFF, 0xFF, 0xFF);
stepper.setStepResolution(L6470_RESOLUTION_128_PER_ONE_STEP);
}
void loop(){
stepper.runByAngular(90);
stepper.busydelay(1000);
stepper.runByAngular(-90);
stepper.busydelay(1000);
}